

BICT mantık şemaları
İndirilebilir BICT mantık şemaları
İndirilebilir mantık şeması örneklerini bu sayfada bir araya getirdik. Buradaki amaç, üstyapı imalatçılarına bu şemaları olduğu gibi ya da ihtiyaçlarına göre ayarlayarak kullanma olanağı sağlamaktır.
Mantık şemalarımızı kullanabilmek için Araçlar ve servisler bölümünden indirilebilen BICT aracının kullanılması gereklidir.
BICT hakkında daha fazla bilgiyi aşağıdaki belgelerde bulabilirsiniz:
Daha ayrıntılı bilgi edinmek için aşağıdaki sekmelerden bir mantık diyagramı seçin veya hemen bu sayfanın altındaki bağlantılardan diyagramları indirin:
- PTO EM5P1
- Acil Durdurma
- Motorun Çalıştırılması
- Motorun Kapatılması
- Motor Devri Kontrolü
- CAN kullanılarak Motor Devri Kontrolü
- Önceden Ayarlı Motor Devri
- Sürücü Bilgileri
- Beşinci Tekerlek Ayarı
- Römork Bağlama Mekanizması Göstergesi
EM5P1 BICT IO temel şablonu v1.0
Açıklama
Elektromekanik PTO EM5 P1 kontrolü, tedarikçi üstyapı imalatçısının CAN veri yolu üzerinden ve acil durum durdurma işlevi için gerekli IO sinyalleriyle Scania BCI kontrol ünitesi tarafından yapılır.
Fonksiyon
Bu BICT dosyasında üstyapı imalatçısı sinyalleriyle EM5P1 kontrol sistemi arasındaki ara yüzün geliştirilebilmesini sağlayan temel şablon bulunur

Aşağıdaki belgelerde daha fazla bilgi bulunabilir:
EM5P1 BICT IO damperi v1.0
Açıklama
Bu BICT mantığı, EM5P1 kullanan ve biri Düz yük boşaltmalı, diğeri de Dökme ayırma tertibatlı kamyon için olmak üzere
programlanabilir 2 basmalı anahtar kullanan 4 solenoid valfi kontrol eden bir damper uygulaması için geçerlidir.
Fonksiyon
Bu BICT mantığı, "EM5P1 BICT temel şablonu"nun daha gelişmiş halidir ve özellikle kullandığınız anahtarlara uyacak şekilde değiştirilebilir; örneğin, programlanabilir basmalı anahtarlar elektrik anahtarlarından gelen fiziksel BCI girişleriyle değiştirilebilir.
BCI çıkışlarının en fazla 3 A sağlayabileceğini unutmayın; bir başka deyişle, damper solenoid valfleriniz daha fazla akım çekiyorsa bunlara yeterli gücün sağlanması için röle kullanılması gerekir.

Aşağıdaki belgelerde daha fazla bilgi bulunabilir:
EM5P1 BICT IO'nun temel şablonu v1.1
Açıklama
Elektromekanik PTO EM5 P1 kontrolü, tedarikçi üstyapı imalatçısının CAN veri yolu üzerinden ve acil durum durdurma işlevi için gerekli IO sinyalleriyle Scania BCI kontrol ünitesi tarafından yapılır.
Fonksiyon
Bu BICT dosyası "EM5P1 BICT IO'nun temel şablonu v1.0.bic" ile aynı temel mantığı içerir ancak aynı zamanda üstyapı için harici CAN veri yolu üzerinde kontrol isteyen üstyapı imalatçıları tarafından kullanılan yapılandırılabilir sinyalleri de içerir

Aşağıdaki belgelerde daha fazla bilgi bulunabilir:
EM5P1 BICT ExtCAN temel şablonu v1.1
Açıklama
Elektromekanik PTO EM5 P1 kontrolü, tedarikçi üstyapı imalatçısının CAN veri yolu üzerinden ve acil durum durdurma işlevi için gerekli IO sinyalleriyle Scania BCI kontrol ünitesi tarafından yapılır.
Fonksiyon
Bu BICT dosyası, diyagram 1 için "EM5P1 BICT IO'nun temel şablonu v1.0.bic" ile aynı mantığı içerir, ancak diğer diyagramlar üstyapı için harici CAN veriyolu üzerinde kontrol isteyen üstyapı imalatçıları tarafından kullanılan yapılandırılabilir sinyalleri kullanır

Aşağıdaki belgelerde daha fazla bilgi bulunabilir:
EM5P1 BICT IO temel şablonu v2.0
Açıklama
Elektromekanik PTO EM5 P1 kontrolü, tedarikçi üstyapı imalatçısının CAN veri yolu üzerinden ve acil durum durdurma işlevi için gerekli IO sinyalleriyle Scania BCI kontrol ünitesi tarafından yapılır.
Fonksiyon
Bu BICT dosyası güncellenmiş sinyalleri ve parametreleri içerir; pompa boyutu, e-makine yönetim parametresi, EM5P1 hata kodları için artık bölme sabiti yok. Bu tür sinyallerin tam açıklamasını diyagram notlarında okuyun!

Aşağıdaki belgelerde daha fazla bilgi bulunabilir:
EMG anahtarlı EM5P1 BICT ExtCAN temel şablonu v2.0
Açıklama
Elektromekanik PTO EM5 P1 kontrolü, tedarikçi üstyapı imalatçısının CAN veri yolu üzerinden ve acil durum durdurma işlevi için gerekli IO sinyalleriyle Scania BCI kontrol ünitesi tarafından yapılır.
Fonksiyon
Bu BICT dosyası, acil durum anahtarı girişli diyagram 1 için "EM5P1 BICT IO temel şablonu v2.0.bic" ile aynı mantığı içerir; ancak diğer diyagramlar, üstyapı için harici CAN veri yolu üzerinde kontrol isteyen üstyapı imalatçıları tarafından kullanılan yapılandırılabilir sinyalleri kullanır

Aşağıdaki belgelerde daha fazla bilgi bulunabilir:
EMG anahtarsız EM5P1 BICT ExtCAN temel şablonu v2.1
Açıklama
Elektromekanik PTO EM5 P1 kontrolü, tedarikçi üstyapı imalatçısının CAN veri yolu üzerinden ve acil durum durdurma işlevi için gerekli IO sinyalleriyle Scania BCI kontrol ünitesi tarafından yapılır.
Fonksiyon
Bu BICT dosyası, acil durum anahtarı girişi olmayan, bunun yerine dahili acil durum devre dışı bırakma sinyali olan diyagram 1 için "EM5P1 BICT IO temel şablonu v2.0.bic" ile benzer mantığı içerir; ancak diğer diyagramlar, üstyapı için harici CAN veri yolu üzerinde kontrol isteyen üstyapı imalatçıları tarafından kullanılan yapılandırılabilir sinyalleri kullanır

Aşağıdaki belgelerde daha fazla bilgi bulunabilir:
Bu şablon, CAN veri yolu mesajları yoluyla EM5P1 kontrolünü tercih eden üstyapı imalatçısı için hazırlanmıştır.
EM5P1'in CAN veri yolu kontrolleri için "EM5P1_BICT_extCAN_signal_definitions v1.1.pdf" CAN veri yolu mesaj spesifikasyonunu okuyun
ve/veya "EM5P1_BICT_extCAN_signal_definitions v2.0.pdf"

Açıklama
Bu fonksiyon, motor sıcaklığının çok yüksek veya yağ basıncının çok düşük olması durumunda motoru otomatik olarak kapatır.
Bir acil durdurma düğmesi, yaralanma riski söz konusu olduğunda motorun kapatılmasına olanak tanır.
Şu tip uygulamalar için uygundur:
- Kereste kamyonları
- Tankerler
- Vinçli kamyonlar
Fonksiyon
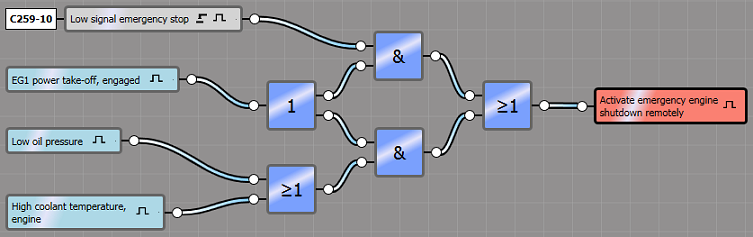
Acil durdurma düğmesinin etkinleştirilmesi durumunda birinci operatör [&] EG PTO’nun devrede olup olmadığını algılar. Bu durumda motor kapatılır.
Motor, aşağıdaki fonksiyonlardan herhangi birinin EG PTO ile birlikte etkinleştirilmesi durumunda da kapatılır:
- Düşük yağ basıncı
- Yüksek soğutma suyu sıcaklığı
EG PTO’su bağlı değilse acil durdurma fonksiyonu motoru etkilemez.
Açıklama
Uzaktan motor çalıştırma, marş anahtarını çalıştırma konumuna getirmek zorunda kalmadan; örneğin kabin dışından bir anahtar kullanarak motoru çalıştırmak içindir.
Şu tip uygulamalar için uygundur:
- Betoniyerler
- Vinçli kamyonlar
Fonksiyon
Tesisatlar arası C259 konektöründeki 9. pim ile (isteğe bağlı) düşük veya yüksek bir sinyal1 etkinleştirildiğinde motor çalıştırılır.

Kabin dışından sinyalleri alabilmek amaçlanıyorsa üstyapı fonksiyonları için bir C494 tesisat-tesisat konnektörüne kablo tesisatı bağlamak uygundur. Kablo tesisatı; C486, C487 ve C488 olmak üzere 3 adet DIN tesisatlar arası konektöre dağıtılır.
Aşağıdaki belgelerde daha fazla bilgi bulunabilir:
1. BICT'de önceden ayarlanmış olmalıdır
Açıklama
Uzaktan motor kapatma, marş anahtarını kilitli konuma çevirmek zorunda kalmadan, mesela kabin dışından bir anahtar kullanarak motoru kapatmak için kullanılır.
Şu tip uygulamalar için uygundur:
- Betoniyerler
- Vinçli kamyonlar
Fonksiyon
Tesisatlar arası C259 konektöründeki 10. pim ile (isteğe bağlı) düşük veya yüksek bir sinyal 1 etkinleştirildiğinde motor çalıştırılır.

Kabin dışından sinyalleri alabilmek amaçlanıyorsa üstyapı fonksiyonları için bir C494 tesisat-tesisat konnektörüne kablo tesisatı bağlamak uygundur. Kablo tesisatı; C486, C487 ve C488 olmak üzere 3 adet DIN tesisatlar arası konektöre dağıtılır.
Aşağıdaki belgelerde daha fazla bilgi bulunabilir:
1. BICT'de önceden ayarlanmış olmalıdır
Açıklama
Bu fonksiyonla, motor devri BCI kontrol ünitesi üzerinden bir bağlantı kullanılarak kabinin dışından kontrol edilebilir.
Şu tip uygulamalar için uygundur:
- İtfaiye araçları
- Betoniyerler
- Beton pompası kamyonları
Fonksiyon
Kablo tesisatları arası C259 konektörü yoluyla bağlantı
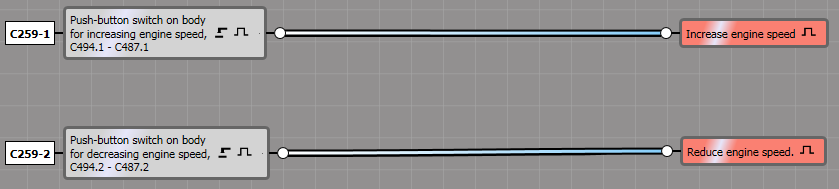
- Tesisatlar arası C259 konektöründeki pim 1 (isteğe bağlı) ile düşük veya yüksek bir sinyal1 etkinleştirilirse motor devri yükselir.
- Tesisatlar arası C259 konektöründeki pim 2 (isteğe bağlı) ile düşük veya yüksek bir sinyal1 etkinleştirilirse motor devri yükselir.
Kabin dışından sinyalleri alabilmek amaçlanıyorsa üstyapı fonksiyonları için bir C494 tesisat-tesisat konnektörüne kablo tesisatı bağlamak uygundur. Kablo tesisatı; C486, C487 ve C488 olmak üzere 3 adet DIN tesisatlar arası konektöre dağıtılır.
EXT anahtarı ile bağlantı
Motor devrini kabinin dışından kontrol edebilmek için EXT anahtarı üzerinden bağlantı yapın.
EXT anahtarı etkinleştirildiğinde ve PTO devreye girdiğinde motor devri 1 etkinleştirilir.

Not: Bu mantık şemasında gösterilen EK PTO yalnızca bir örnektir. Tüm PTO tipleri bağlanabilir.
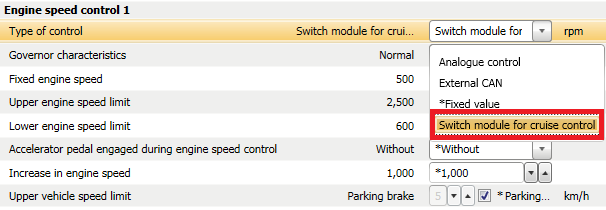
Motor devri 1 parametresinin aşağıdaki şekilde gösterildiği gibi Scania üstyapı imalatçılarına yönelik programlama aracında (SDP3) ayarlanması gerekir.
- Kontrol Tipi: Seyir kontrol anahtarı modülü.
- Diğer ayar değerleri üstyapının ihtiyaçlarına bağlıdır.
1. BICT'de önceden ayarlanmış olmalıdır
Açıklama
Bu fonksiyonla, harici kontrol ünitesinden gelen bir CAN mesajı kullanılarak motor devri kabinin dışından kontrol edilebilir.
Şu tip uygulamalar için uygundur:
- İtfaiye araçları
- Betoniyerler
- Beton pompası kamyonları
CAN Sinyallerini Bağlama
C493-3
Üstyapı fonksiyonunu, kablo tesisatları arası C493 konektörü pim 3 ile düşük harici CAN sinyaline bağlayın.
C493-4
Üstyapı fonksiyonunu, kablo tesisatları arası C493 konektörü pim 4 ile düşük harici CAN sinyaline bağlayın.
Fonksiyon
Motor devrini yükseltebilmek veya düşürebilmek için J1939 protokolüne göre elektrik arayüzü (BCI, Üstyapı İletişim Arayüzü) kontrol ünitesine doğru CAN mesajlarının gönderilmesi gerekir.
Aşağıdaki mantık şeması, motor devrini kontrol etmek için kabinin dışından CAN mesajlarının kullanılmasını mümkün kılar. EXT anahtarı etkinleştirildiğinde ve PTO devreye girdiğinde motor devri 1 etkinleştirilir.

Not: Bu mantık şemasında gösterilen EK PTO yalnızca bir örnektir. Tüm PTO tipleri bağlanabilir. Motor devri 1 parametresinin, aşağıdaki şekilde gösterildiği gibi Scania üstyapı imalatçılarına yönelik programlama aracında (SDP3) ayarlanması gerekir.
| ||
Kabin dışından sinyalleri alabilmek amaçlanıyorsa üstyapı fonksiyonları için bir C494 tesisat-tesisat konnektörüne kablo tesisatı bağlamak uygundur. Kablo tesisatı; C486, C487 ve C488 olmak üzere 3 adet DIN tesisatlar arası konektöre dağıtılır.
Aşağıdaki belgelerde daha fazla bilgi bulunabilir:
Açıklama
Bu fonksiyonla, motor devri farklı koşullarda, örneğin, devrede olan bir PTO ile, aşağıdaki örnekte gösterildiği gibi önceden belirlenen bir değere yükseltilebilir.
Örnek uygulamalar:
- Motoru platform devrilmesine hazırlama.
- Motoru vinçle kaldırma için hazırlama.
Şu tip uygulamalar için uygundur:
- Damperli kamyonlar
- Vinçli kamyonlar
Fonksiyon
Kabin dışından sinyalleri alabilmek amaçlanıyorsa üstyapı fonksiyonları için bir C494 tesisat-tesisat konnektörüne kablo tesisatı bağlamak uygundur. Kablo tesisatı; C486, C487 ve C488 olmak üzere 3 adet DIN tesisatlar arası konektöre dağıtılır.
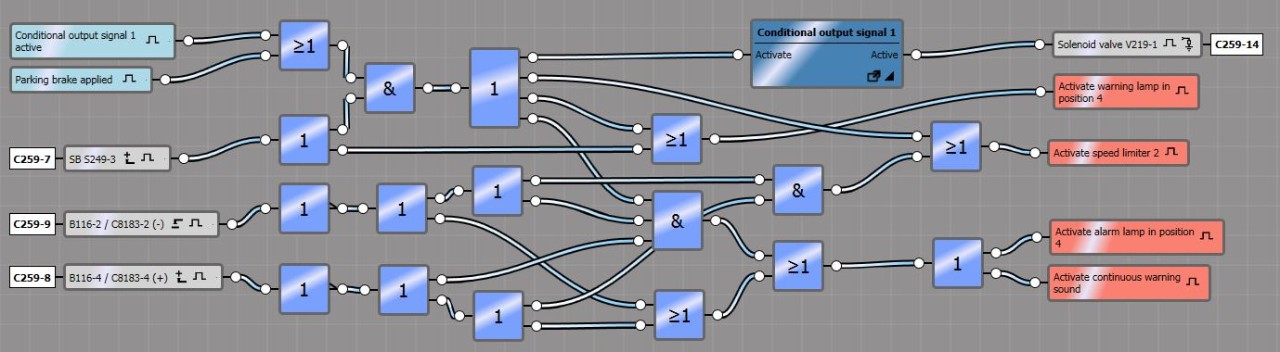
Aşağıdaki mantık şeması, motor devrini önceden ayarlı bir değere artırmayı mümkün kılar. EG PTO bağlandığında motor hızı 1 etkinleştirilir.

Not: Bu mantık şemasında gösterilen EG PTO yalnızca bir örnektir. Tüm PTO tipleri bağlanabilir.
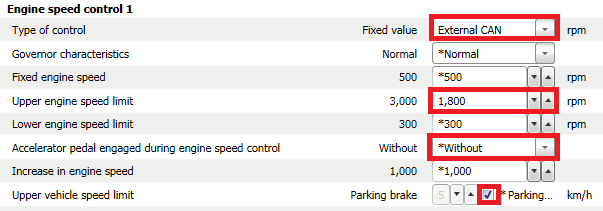
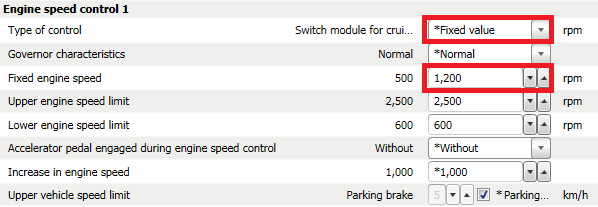
Motor devri 1 parametresinin, aşağıdaki şekilde gösterildiği gibi Scania üstyapı imalatçılarına yönelik programlama aracında (SDP3) ayarlanması gerekir.
- Kontrol Tipi: Sabit değer.
- Diğer ayar değerleri üstyapının ihtiyaçlarına bağlıdır.
Açıklama
Bu fonksiyon, üstyapıdan gelen mesajları gösterge grubunda görüntülemek için kullanılabilir.
Tüm uygulama tiplerinde kullanılabilir.
Fonksiyon
Düşük veya yüksek sinyal1 kablo tesisatları arası C259 konektöründeki pim 1 (isteğe bağlı) ile etkinleştirilirse, gösterge grubundaki sürücü bilgisi ekranı etkinleşir.

Kabin dışından sinyalleri alabilmek amaçlanıyorsa üstyapı fonksiyonları için bir C494 tesisat-tesisat konnektörüne kablo tesisatı bağlamak uygundur. Kablo tesisatı; C486, C487 ve C488 olmak üzere 3 adet DIN tesisatlar arası konektöre dağıtılır.
Aşağıdaki belgelerde daha fazla bilgi bulunabilir:
1. BICT'de önceden ayarlanmış olmalıdır
Açıklama
Bu fonksiyon sürücünün aracı kilidi açılmış bir beşinci tekerlekle sürmesini önler.
Kilit sürüş esnasında açılırsa, sürücü bir uyarı göstergesi alır ve araç hızı 10 km/saat'e (6 mph) düşürülür.
Şu tip uygulamalar için uygundur:
- Ayarlanabilir bir beşinci tekerleği olan araçlar
- Çekiciler
Fonksiyon
- Beşinci tekerlek anahtarı ve el freni etkinleştirildiğinde araç hızının 1 km/saat'in (0,6 mph) altına düşmesi durumunda operatör [&] beşinci tekerlek kilidini açar.
- Fonksiyon etkinleştirildiğinde beşinci tekerleğin konumunu ayarlamak üzere el frenini serbest bırakıp aracı sürmek mümkündür.
- Aracı beşinci tekerlek anahtarı etkin olarak sürerken, araç hızının 5 km/saat'in (3,1 mph) üzerine çıkması durumunda fonksiyon beşinci tekerlek kilidini kapatır.
- Sürüş sırasında beşinci tekerlek anahtarı devre dışı değilse hız 10 km/saat'i (6 mph) aşmaz.
- Herhangi bir sensör beşinci tekerleğin hareket ettiğini tespit ederse, sürücü, gösterge grubunda bir uyarı göstergesi alır.
- İki sensör de beşinci tekerleğin açık konumda olduğunu tespit ederse sürücü, gösterge grubunda bir uyarı göstergesi alır ve araç hızı 10 km/saat'e (6 mph) düşer.
Not:
Park freninin bağımlı olması, fonksiyon etkinleştirilirken aracın sabit konumda kalmasını sağlar.
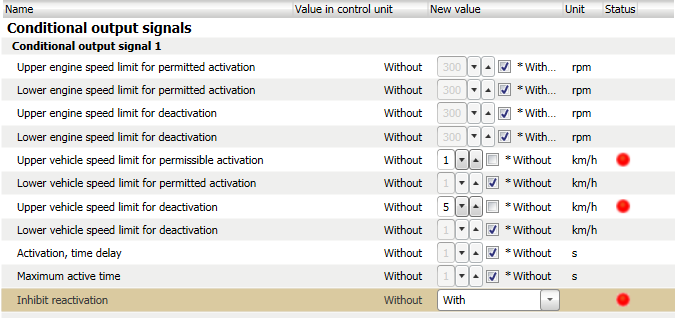
Şartlı kontrol hız değerlerinin üstyapı imalatçılarına yönelik Scania programlama aracında (SDP3) aşağıdaki şekilde gösterildiği gibi ayarlanması gerekir.
Şartlı çıkış sinyalleri 1:
- İzin verilebilir etkinleştirme için araç hızı üst limiti.
Ayarlanan değer: 1 km/saat
- Devreden çıkarma için araç hızı üst limiti.
Ayarlanan değer: 5 km/saat
- Yeniden etkinleştirmeyi engelle
Ayarlanan değer: ile
Aşağıdaki belgelerde daha fazla bilgi bulunabilir:
Açıklama
Bu fonksiyon, römork bağlama mekanizmasının açık veya kapalı olduğuna ilişkin göstergeleri gösterge grubunda görmenize olanak tanır. Gösterge lambası yaylı onay anahtarı ile kapatılabilir.
Römork bağlama mekanizması açıksa, açık çekme ünitesinin gösterge lambası hemen yanar.
Uzaktan kontrol edilen römork bağlama mekanizmalı veya yarı römorklu iki yönlü birleştirilmiş araçlar için uygundur.
Fonksiyon
Bu fonksiyon, römork bağlama mekanizmasının açık veya kapalı olduğuna ilişkin göstergeleri gösterge grubunda görmenize olanak tanır. Gösterge lambası yaylı onay anahtarı ile kapatılabilir.
Römork bağlama mekanizması açıksa, açık çekme ünitesinin gösterge lambası hemen yanar.
Uzaktan kontrol edilen römork bağlama mekanizmalı veya yarı römorklu iki yönlü birleştirilmiş araçlar için uygundur.
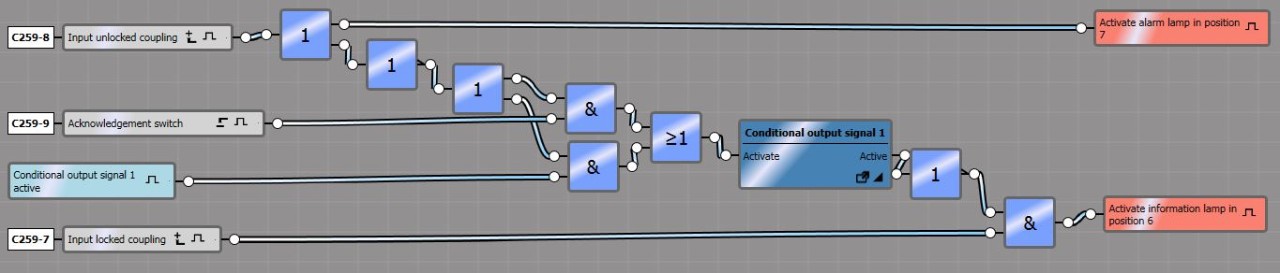
Yakınlaştırmak için görüntüye tıklayın
Aşağıdaki belgelerde daha fazla bilgi bulunabilir:
