

Diagramas lógicos para BICT
Diagramas lógicos para BICT para download
Nessa página, reunimos exemplos de diagramas lógicos para download. A intenção é que os encarroçadores possam usá-los como estão ou ajustá-los de acordo com suas próprias necessidades.
Para usar nossos diagramas lógicos, é preciso ter uma ferramenta BICT. Faça o download dela em Ferramentas e serviços.
Obtenha mais informações sobre a BICT nos seguintes documentos:
Para obter informações detalhadas, selecione um diagrama lógico nas guias abaixo ou faça download imediatamente mais abaixo nesta página:
- PTO EM5P1
- Parada de emergência
- Partida do motor
- Desligamento do motor
- Controle de rotação do motor
- Controle de rotação do motor usando CAN
- Rotação do motor predefinida
- Informações para o motorista
- Ajuste da quinta roda
- Indicação de acoplamento do reboque
Gabarito básico v1.0 do EM5P1 BICT IO
Descrição
A PTO eletromecânica EM5 P1 é controlada pela unidade de comando Scania BCI por meio do barramento CAN do encarroçador externo e dos sinais de E/S necessários para a função de parada de emergência.
Função
Este arquivo BICT contém o gabarito básico para poder desenvolver a interface entre os sinais do encarroçador e o sistema de controle EM5P1

Encontre mais informações nos seguintes documentos:
Basculante v1.0 do EM5P1 BICT IO
Descrição
Essa lógica BICT se aplica a uma aplicação basculante usando o EM5P1 e controlando 4 válvulas solenoides usando 2 botões
basculantes programáveis, 1 para caminhão basculante plano e 1 para caminhão de liberação do espalhador.
Função
Esta lógica BICT é um desenvolvimento adicional do "gabarito básico de EM5P1 BICT" e pode ser modificada para se adequar aos seus interruptores específicos, por exemplo, os botões basculantes programáveis podem ser substituídos por entradas BCI físicas de interruptores elétricos.
Preste atenção que as saídas BCI não podem fornecer mais de 3 A, ou seja, se as válvulas solenoides basculantes consumirem mais corrente, use relés para alimentar essas válvulas solenoides.

Encontre mais informações nos seguintes documentos:
Gabarito básico v1.1 do EM5P1 BICT IO
Descrição
A PTO eletromecânica EM5 P1 é controlada pela unidade de comando Scania BCI por meio do barramento CAN do encarroçador externo e dos sinais de E/S necessários para a função de parada de emergência.
Função
Este arquivo BICT contém a mesma lógica básica do "modelo básico do EM5P1 BICT IO v1.0.bic", mas inclui também os sinais configuráveis usados por encarroçadores que desejam controle sobre o barramento CAN externo para carrocerias

Encontre mais informações nos seguintes documentos:
Gabarito básico v1.1 do EM5P1 BICT ExtCAN
Descrição
A PTO eletromecânica EM5 P1 é controlada pela unidade de comando Scania BCI por meio do barramento CAN do encarroçador externo e dos sinais de E/S necessários para a função de parada de emergência.
Função
Este arquivo BICT contém a mesma lógica do "modelo básico do EM5P1 BICT IO v1.0.bic" para o diagrama 1, no entanto, os outros diagramas usam os sinais configuráveis usados por encarroçadores que desejam controle sobre o barramento CAN externo para carrocerias

Encontre mais informações nos seguintes documentos:
Gabarito básico v2.0 do EM5P1 BICT IO
Descrição
A PTO eletromecânica EM5 P1 é controlada pela unidade de comando Scania BCI por meio do barramento CAN do encarroçador externo e dos sinais de E/S necessários para a função de parada de emergência.
Função
Este arquivo BICT contém sinais e parâmetros atualizados, por ex. não há mais constante de divisão para tamanho da bomba, parâmetro de controle da máquina eletrônica, códigos de erro EM5P1. Leia a descrição completa de tais sinais nas notas do diagrama!

Encontre mais informações nos seguintes documentos:
Gabarito básico v2.0 do EM5P1 BICT ExtCAN com interruptor EMG
Descrição
A PTO eletromecânica EM5 P1 é controlada pela unidade de comando Scania BCI por meio do barramento CAN do encarroçador externo e dos sinais de E/S necessários para a função de parada de emergência.
Função
Este arquivo BICT contém a mesma lógica do "Gabarito básico v2.0.bic do EM5P1 BICT IO" do diagrama 1 com entrada do interruptor de emergência. Porém, os outros diagramas usam os sinais configuráveis usados por encarroçadores que desejam controle sobre o barramento CAN externo para carroceria

Encontre mais informações nos seguintes documentos:
Gabarito básico v2.1 do EM5P1 BICT ExtCAN sem interruptor EMG
Descrição
A PTO eletromecânica EM5 P1 é controlada pela unidade de comando Scania BCI por meio do barramento CAN do encarroçador externo e dos sinais de E/S necessários para a função de parada de emergência.
Função
Este arquivo BICT contém uma lógica semelhante à do "Gabarito básico v2.0.bic do EM5P1 BICT IO" do diagrama 1, sem a entrada do interruptor de emergência, substituída pelo sinal de desativação de emergência. Porém, os outros diagramas usam os sinais configuráveis usados por encarroçadores que desejam controle sobre o barramento CAN externo para carroceria

Encontre mais informações nos seguintes documentos:
Este gabarito está preparado para um encarroçador que prefira o controle EM5P1 por meio das mensagens de barramento CAN
Para controles de barramento CAN do EM5P1, leia a especificação da mensagem do barramento CAN "EM5P1_BICT_extCAN_signal_definitions v1.1.pdf"
e/ou "EM5P1_BICT_extCAN_signal_definitions v2.0.pdf"

Descrição
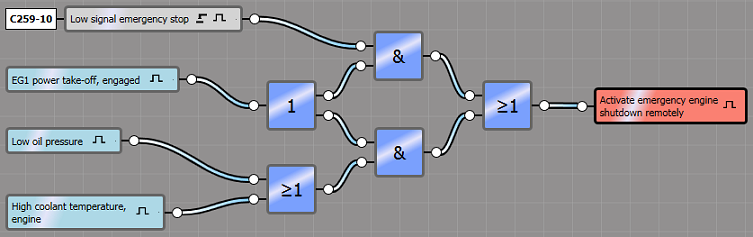
Com essa função, o motor será desligado automaticamente se a temperatura do motor aumentar muito ou se a pressão do óleo diminuir demais.
Um interruptor de parada de emergência permite desligar o motor se houver risco de ferimentos.
Adequado para aplicações como:
- Caminhões para transporte de toras
- Caminhões tanque
- Caminhões guindaste
Função
Se o interruptor de parada de emergência for ativado, o primeiro operador [&] detectará que a tomada de força EG está ativada. Nesse caso, o motor será desligado.
Além disso, o motor será desligado se qualquer uma destas funções for ativada em combinação com a tomada de força EG:
- Baixa pressão de óleo
- Alta temperatura do líquido de arrefecimento
Se a tomada de força EG não estiver conectada, a parada de emergência não afetará o motor.
Descrição
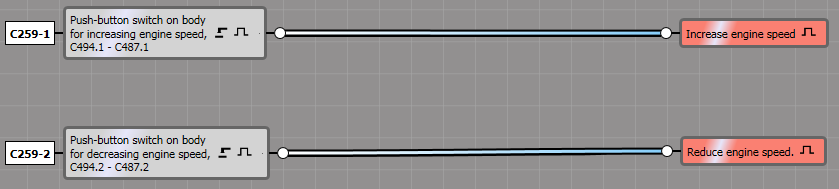
A partida remota do motor é usada para iniciar o motor sem a necessidade de girar a chave de partida para a posição de partida (por exemplo, usando um interruptor fora da cabina).
Adequado para aplicações como:
- Caminhões betoneira
- Caminhões guindaste
Função
O motor será iniciado se um sinal1 baixo ou alto for ativado por meio do pino 9 (opcional) no conector de chicote-para-chicote C259.

Para receber os sinais de fora da cabina, conecte um chicote de cabos para funções da carroceria ao conector de chicote-para-chicote C494. O chicote de cabos é distribuído aos três conectores de chicote-para-chicote DIN: C486, C487 e C488.
Encontre mais informações nos seguintes documentos:
1. Deve ser predefinido no BICT
Descrição
O desligamento remoto do motor é usado para desligar o motor sem a necessidade de girar a chave de partida para a posição travada (por exemplo, usando um interruptor fora da cabina).
Adequado para aplicações como:
- Caminhões betoneira
- Caminhões guindaste
Função
O motor será iniciado se um sinal 1 baixo ou alto for ativado por meio do pino 10 (opcional) no conector de chicote-para-chicote C259.

Para receber os sinais de fora da cabina, conecte um chicote de cabos para funções da carroceria ao conector de chicote-para-chicote C494. O chicote de cabos é distribuído aos três conectores de chicote-para-chicote DIN: C486, C487 e C488.
Encontre mais informações nos seguintes documentos:
1. Deve ser predefinido no BICT
Descrição
Com essa função, é possível controlar a rotação do motor do lado de fora da cabina usando uma conexão por meio da unidade de comando da BCI.
Adequado para aplicações como:
- Carros de bombeiros
- Caminhões betoneira
- Caminhões com bomba de concreto
Função
Conexão por meio do conector de chicote-para-chicote C259
- A rotação do motor aumentará se um sinal 1 baixo ou alto for ativado por meio do pino 1 (opcional) no conector de chicote-para-chicote C259.
- A rotação do motor aumentará se um sinal 1 baixo ou alto for ativado por meio do pino 2 (opcional) no conector de chicote-para-chicote C259.
Para receber os sinais de fora da cabina, conecte um chicote de cabos para funções da carroceria ao conector de chicote-para-chicote C494. O chicote de cabos é distribuído aos três conectores de chicote-para-chicote DIN: C486, C487 e C488.
Conexão por meio do interruptor EXT
Faça a conexão por meio do interruptor EXT para controlar a rotação do motor do lado de fora da cabina.
Quando o interruptor EXT e a tomada de força forem ativados, a rotação do motor 1 será ativada.

Nota: a tomada de força EK mostrada nesse diagrama lógico é apenas um exemplo. É possível conectar todos os tipos de tomada de força.
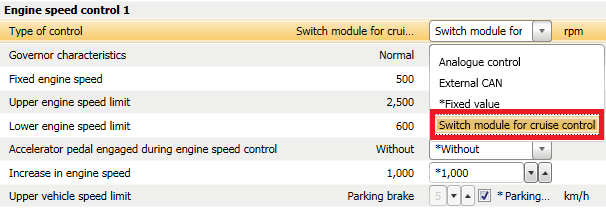
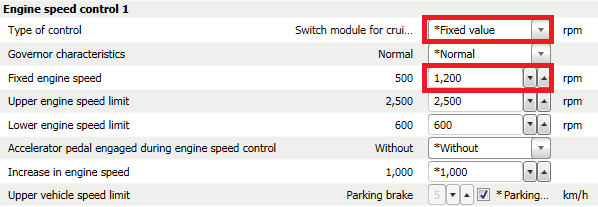
O parâmetro de rotação do motor 1 deve ser ajustado na ferramenta de programação para encarroçadores (SDP3) da Scania como mostrado na ilustração abaixo.
- Tipo de controle: módulo de interruptores do controle de velocidade.
- Outros valores de configuração dependem das necessidades da carroceria.
1. Deve ser predefinido no BICT
Descrição
Com essa função, é possível controlar a rotação do motor do lado de fora da cabina usando uma mensagem CAN de uma unidade de comando externa.
Adequado para aplicações como:
- Carros de bombeiros
- Caminhões betoneira
- Caminhões com bomba de concreto
Conexão de sinais CAN
C493-3
Conecte a função da carroceria ao sinal CAN externo baixo por meio do conector de chicote-para-chicote C493, pino 3.
C493-4
Conecte a função da carroceria ao sinal CAN externo baixo por meio do conector de chicote-para-chicote C493, pino 4.
Função
Para poder aumentar ou diminuir a rotação do motor, as mensagens CAN corretas, de acordo com o protocolo J1939, devem ser enviadas à unidade de comando da interface elétrica (BCI, Interface de comunicação da carroceria).
O seguinte diagrama lógico possibilita o uso de mensagens CAN para controlar a rotação do motor do lado de fora da cabina. Quando o interruptor EXT e a tomada de força forem ativados, a rotação do motor 1 será ativada.

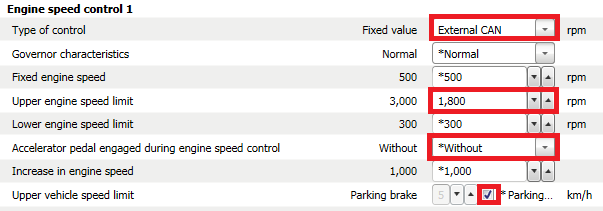
Nota: a tomada de força EK mostrada nesse diagrama lógico é apenas um exemplo. É possível conectar todos os tipos de tomada de força. O parâmetro de rotação do motor 1 deve ser ajustado na ferramenta de programação para encarroçadores (SDP3) da Scania como mostrado na ilustração abaixo.
| ||
Para receber os sinais de fora da cabina, conecte um chicote de cabos para funções da carroceria ao conector de chicote-para-chicote C494. O chicote de cabos é distribuído aos três conectores de chicote-para-chicote DIN: C486, C487 e C488.
Encontre mais informações nos seguintes documentos:
Descrição
Com essa função, a rotação do motor pode ser aumentada para um valor predefinido com diferentes condições (por exemplo, com uma tomada de força ativada), como mostrado no exemplo abaixo.
Exemplos de aplicações:
- Preparação do motor para inclinação da plataforma.
- Preparação do motor para elevação no guindaste.
Adequado para aplicações como:
- Caminhões basculantes
- Caminhões guindaste
Função
Para receber os sinais de fora da cabina, conecte um chicote de cabos para funções da carroceria ao conector de chicote-para-chicote C494. O chicote de cabos é distribuído aos três conectores de chicote-para-chicote DIN: C486, C487 e C488.
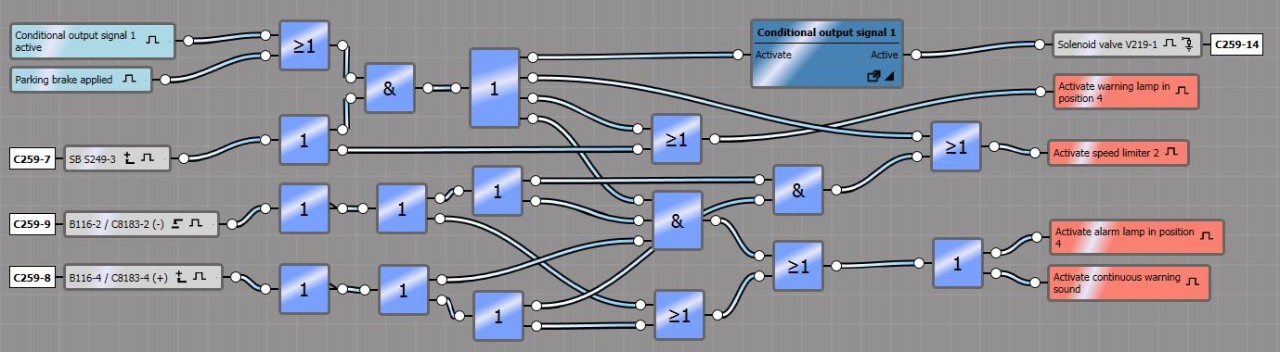
O seguinte diagrama lógico possibilita aumentar a rotação do motor para um valor predefinido. Quando a tomada de força for conectada, a rotação do motor 1 será ativada.

Nota: a tomada de força EG mostrada nesse diagrama lógico é apenas um exemplo. É possível conectar todos os tipos de tomada de força.
O parâmetro de rotação do motor 1 deve ser ajustado na ferramenta de programação para encarroçadores (SDP3) da Scania como mostrado na ilustração abaixo.
- Tipo de controle: valor fixo.
- Outros valores de configuração dependem das necessidades da carroceria.
Descrição
É possível usar essa função para mostrar mensagens da carroceria no painel de instrumentos.
Adequada para todos os tipos de aplicações.
Função
O visor com informações para o motorista no painel de instrumentos será ativado se um sinal1 baixo ou alto for ativado por meio do pino 1 (opcional) no conector de chicote-para-chicote C259.

Para receber os sinais de fora da cabina, conecte um chicote de cabos para funções da carroceria ao conector de chicote-para-chicote C494. O chicote de cabos é distribuído aos três conectores de chicote-para-chicote DIN: C486, C487 e C488.
Encontre mais informações nos seguintes documentos:
1. Deve ser predefinido no BICT
Descrição
Essa função impede o motorista de dirigir com uma quinta roda destravada.
Se a trava estiver aberta ao dirigir, o motorista receberá uma indicação de advertência e a velocidade do veículo será reduzida para 10 km/h (6 mph).
Adequado para aplicações como:
- Veículos com quinta roda ajustável
- Tratores
Função
- Quando o interruptor da quinta roda e o freio de mão forem ativados, o operador [&] abrirá a trava da quinta roda se a velocidade do veículo for inferior a 1 km/h (0,6 mph).
- Quando a função estiver ativada, será possível liberar o freio de mão e dirigir o veículo para ajustar a posição da quinta roda.
- Ao dirigir com o interruptor da quinta roda ativado, a função fechará a trava da quinta roda se a velocidade do veículo for superior a 5 km/h (3,1 mph).
- Se o interruptor da quinta roda não for desativado ao dirigir, a velocidade não excederá 10 km/h (6 mph).
- Se algum sensor detectar que a quinta roda está se movendo, o motorista receberá uma indicação de advertência no painel de instrumentos.
- Se ambos os sensores detectarem que a quinta roda está na posição aberta, o motorista receberá uma indicação de advertência no painel de instrumentos e a velocidade do veículo será reduzida para 10 km/h (6 mph).
Nota:
A dependência do freio de mão garante que o veículo esteja parado ao ativar a função.
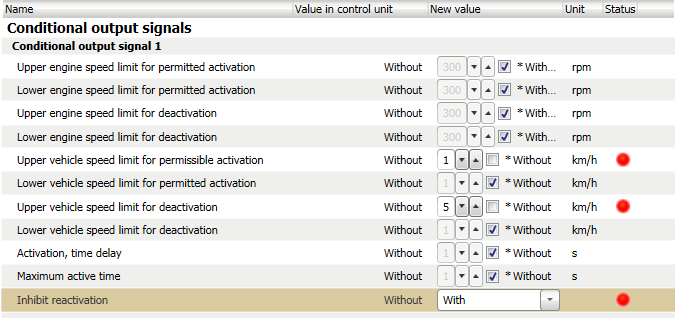
Os valores de velocidade para o controle condicional devem ser ajustados na ferramenta de programação para encarroçadores (SDP3) da Scania, como mostrado na ilustração abaixo.
Sinais de saída condicionais 1:
- Limite superior de velocidade do veículo para ativação permitida.
Valor definido em: 1 km/h
- Limite superior de velocidade do veículo para desativação.
Valor definido em: 5 km/h
- Inibir reativação
Valor definido em: com
Encontre mais informações nos seguintes documentos:
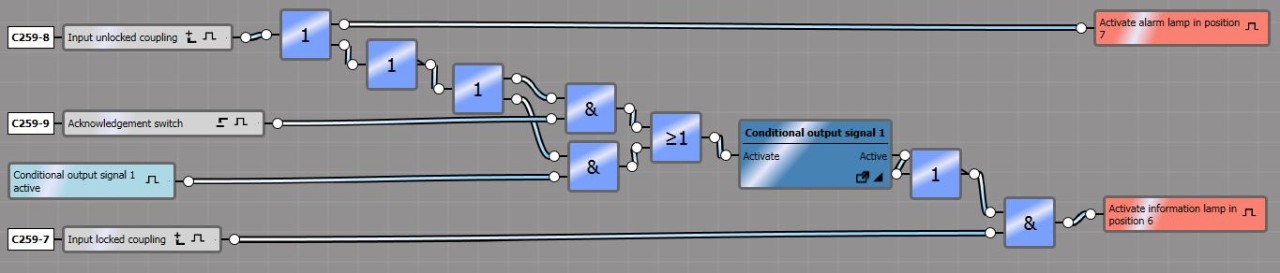
Descrição
Essa função possibilita obter indicações no painel de instrumentos se o acoplamento do reboque estiver aberto ou fechado. A luz indicadora pode ser desligada por um interruptor de confirmação provido de mola.
Se o acoplamento do reboque estiver aberto, a luz indicadora de unidade de reboque aberta acenderá imediatamente.
Adequado para veículos com acoplamento de reboque por controle remoto para reboque ou carreta acoplada com semirreboque.
Função
Essa função possibilita obter indicações no painel de instrumentos se o acoplamento do reboque estiver aberto ou fechado. A luz indicadora pode ser desligada por um interruptor de confirmação provido de mola.
Se o acoplamento do reboque estiver aberto, a luz indicadora de unidade de reboque aberta acenderá imediatamente.
Adequado para veículos com acoplamento de reboque por controle remoto para reboque ou carreta acoplada com semirreboque.
Clique na imagem para ampliá-la
Encontre mais informações nos seguintes documentos:
