

Diagramas lógicos de BICT
Diagramas lógicos descargables para BICT
En esta página hemos recopilado ejemplos de diagramas lógicos descargables. La intención es que los carroceros puedan utilizarlos tal y como están o ajustarlos para satisfacer sus propias necesidades.
Para poder utilizar nuestros diagramas lógicos, es necesario disponer de la herramienta BICT, que se puede descargar desde Herramientas y servicios.
Encontrará más información sobre BICT en los siguientes documentos:
Para obtener información detallada, seleccione un diagrama lógico en las pestañas a continuación o descárguelo al instante más adelante en esta página:
- PTO EM5P1
- Parada de emergencia
- Arranque del motor
- Parada del motor
- Control del régimen del motor
- Control del régimen del motor mediante CAN
- Régimen del motor predeterminado
- Información del conductor
- Ajuste de la quinta rueda
- Indicación del acoplamiento del remolque
Plantilla básica de EM5P1 BICT IO v1.0
Descripción
La PTO electromecánica EM5 P1 se controla mediante la unidad de mando BCI de Scania a través del bus CAN externo del carrocero y las señales de E/S necesarias para la función de parada de emergencia.
Función
Este archivo BICT contiene la plantilla básica para poder desarrollar una interfaz entre las señales del carrocero y el sistema de control EM5P1.

Encontrará más información en los siguientes documentos:
EM5P1 BICT IO's tipper v1.0
Descripción
Esta lógica BICT se aplica a una aplicación de volquete que usa la EM5P1 y controla 4 válvulas solenoide mediante 2 válvulas programables
pulsadores basculantes, 1 para camión volquete plano y 1 para camión esparcidor.
Función
Esta lógica BICT es un desarrollo adicional de la "plantilla básica BICT EM5P1" y se puede modificar para adaptarse a sus interruptores particulares, por ejemplo, los pulsadores basculantes programables se pueden reemplazar por entradas BCI físicas de interruptores eléctricos.
Tenga en cuenta que las salidas BCI no pueden suministrar más de 3 A, es decir, si las válvulas solenoides de su volquete consumen más corriente, se deben usar relés para alimentar dichas válvulas solenoide.

Encontrará más información en los siguientes documentos:
Plantilla básica de EM5P1 BICT IO v1.1
Descripción
La PTO electromecánica EM5 P1 se controla mediante la unidad de mando BCI de Scania a través del bus CAN externo del carrocero y las señales de E/S necesarias para la función de parada de emergencia.
Función
Este archivo BICT contiene la misma lógica básica que "EM5P1 BICT IO's basic template v1.0.bic", sin embargo, incluye también las señales configurables utilizadas por los carroceros que desean controlar el bus CAN externo para la carrocería.

Encontrará más información en los siguientes documentos:
Plantilla básica EM5P1 BICT ExtCAN v1.1
Descripción
La PTO electromecánica EM5 P1 se controla mediante la unidad de mando BCI de Scania a través del bus CAN externo del carrocero y las señales de E/S necesarias para la función de parada de emergencia.
Función
Este archivo BICT contiene la misma lógica que "EM5P1 BICT IO's basic template v1.0.bic" para el diagrama 1, sin embargo, el otro diagrama utiliza las señales configurables utilizadas por los carroceros que desean controlar el bus CAN externo para la carrocería.

Encontrará más información en los siguientes documentos:
Plantilla básica de EM5P1 BICT IO v2.0
Descripción
La PTO electromecánica EM5 P1 se controla mediante la unidad de mando BCI de Scania a través del bus CAN externo del carrocero y las señales de E/S necesarias para la función de parada de emergencia.
Función
Este archivo BICT contiene señales y parámetros actualizados, p.e. no más constante de división para el tamaño de la bomba, parámetro de control de la máquina eléctrica, códigos de error EM5P1. ¡Lea la descripción completa de dichas señales en las notas del diagrama!

Encontrará más información en los siguientes documentos:
EM5P1 BICT ExtCAN basic template v2.0 w EMG switch
Descripción
La PTO electromecánica EM5 P1 se controla mediante la unidad de mando BCI de Scania a través del bus CAN externo del carrocero y las señales de E/S necesarias para la función de parada de emergencia.
Función
Este archivo BICT contiene la misma lógica que la "EM5P1 BICT IO's basic template v2.0.bic" para el diagrama 1 con entrada de interruptor de emergencia, sin embargo, el otro diagrama utiliza las señales configurables utilizadas por los carroceros que desean controlar el bus CAN externo para la carrocería.

Encontrará más información en los siguientes documentos:
EM5P1 BICT ExtCAN basic template v2.1 wo EMG switch
Descripción
La PTO electromecánica EM5 P1 se controla mediante la unidad de mando BCI de Scania a través del bus CAN externo del carrocero y las señales de E/S necesarias para la función de parada de emergencia.
Función
Este archivo BICT contiene lógica similar que la "EM5P1 BICT IO's basic template v2.0.bic" para el diagrama 1 sin la entrada de interruptor de emergencia, que se sustituye por la señal interna de desactivación de emergencia, sin embargo, el otro diagrama utiliza las señales configurables utilizadas por los carroceros que desean controlar el bus CAN externo para la carrocería.

Encontrará más información en los siguientes documentos:
Esta plantilla está preparada para carroceros que prefieren el control EM5P1 mediante mensajes de bus CAN.
Para los controles de bus CAN de EM5P1, lea la especificación del mensaje del bus CAN "EM5P1_BICT_extCAN_signal_definitions v1.1.pdf"
y/o "EM5P1_BICT_extCAN_signal_definitions v2.0.pdf"

Descripción
Con esta función, el motor se apagará automáticamente si la temperatura del motor es muy alta o si la presión de aceite es muy baja.
Un interruptor de parada de emergencia ofrece la posibilidad de apagar el motor si existe algún riesgo de daños personales.
Adecuado para aplicaciones como:
- Camiones para troncos
- Depósitos
- Camiones grúa
Función
Si se activa el interruptor de parada de emergencia, el primer operador [&] notará que la toma de fuerza EG está activada. En este caso, se apagará el motor.
El motor también se apagará si alguna de las siguientes funciones se encuentra activada en combinación con la toma de fuerza EG:
- Presión de aceite baja
- Temperatura del refrigerante alta
Si la toma de fuerza EG no está conectada, la parada de emergencia no afectará al motor.

Descripción
El arranque del motor a distancia se utiliza para arrancar el motor sin tener que girar la llave hasta la posición de arranque mediante el uso, por ejemplo, de un interruptor fuera de la cabina.
Adecuado para aplicaciones como:
- Camiones hormigonera
- Camiones grúa
Función
El motor arrancará si se activa una señal baja o alta1 mediante la clavija 9 (opcional) en el conector C259.

Para poder recibir las señales fuera de la cabina, resulta adecuado enchufar un mazo de cables para las funciones de la carrocería al conector C494. El mazo de cables se distribuye a los 3 conectores DIN, C486, C487 y C488.
Encontrará más información en los siguientes documentos:
1. Debe estar predeterminado en BICT
Descripción
La parada del motor a distancia se utiliza para parar el motor sin tener que girar la llave de encendido hasta la posición del icono del candado mediante el uso, por ejemplo, de un interruptor fuera de la cabina.
Adecuado para aplicaciones como:
- Camiones hormigonera
- Camiones grúa
Función
El motor arrancará si se activa una señal baja o alta 1 mediante la clavija 10 (opcional) en el conector C259.

Para poder recibir las señales fuera de la cabina, resulta adecuado enchufar un mazo de cables para las funciones de la carrocería al conector C494. El mazo de cables se distribuye a los 3 conectores DIN, C486, C487 y C488.
Encontrará más información en los siguientes documentos:
1. Debe estar predeterminado en BICT
Descripción
Con esta función, el régimen del motor se puede controlar desde el exterior de la cabina mediante una conexión a través de la unidad de mando BCI.
Adecuado para aplicaciones como:
- Camiones de bomberos
- Camiones hormigonera
- Camiones con bomba de hormigón
Función
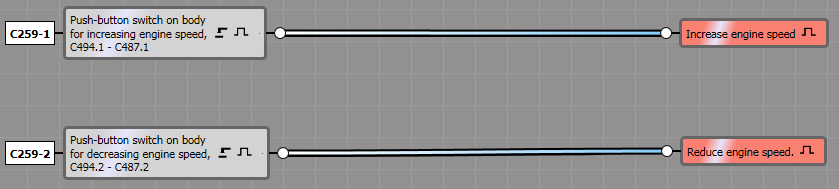
Conexión mediante el conector entre mazos de cables C259
- El régimen del motor aumentará si se activa una señal baja o alta1 mediante la clavija 1 (opcional) en el conector entre mazos de cables C259.
- El régimen del motor aumentará si se activa una señal baja o alta1 mediante la clavija 2 (opcional) en el conector entre mazos de cables C259.
Para poder recibir las señales fuera de la cabina, resulta adecuado enchufar un mazo de cables para las funciones de la carrocería al conector C494. El mazo de cables se distribuye a los 3 conectores DIN, C486, C487 y C488.
Conexión mediante el interruptor EXT
Realice la conexión mediante el interruptor EXT para permitir el control del régimen del motor desde el exterior de la cabina.
Cuando se activa el interruptor EXT y la toma de fuerza, se activará el régimen del motor 1.

Nota: La toma de fuerza EK que se muestra en este diagrama lógico solo es un ejemplo. Se pueden conectar todos los tipos de tomas de fuerza.
El parámetro del régimen del motor 1 debe ajustarse en la herramienta de programación para carroceros (SDP3) de Scania, como se muestra en la siguiente ilustración.
- Tipo de control: módulo de interruptores del programador de velocidad.
- Otros valores de configuración dependen de las necesidades de la carrocería.

1. Debe estar predeterminado en BICT
Descripción
Con esta función, el régimen del motor se puede controlar desde el exterior de la cabina mediante un mensaje CAN desde una unidad de mando externa.
Adecuado para aplicaciones como:
- Camiones de bomberos
- Camiones hormigonera
- Camiones con bomba de hormigón
Conexión de señales CAN
C493-3
Conecte la función de carrocería a una señal CAN externa baja mediante el conector entre mazos de cables C493, clavija 3.
C493-4
Conecte la función de carrocería a una señal CAN externa baja mediante el conector entre mazos de cables C493, clavija 4.
Función
Para poder aumentar o disminuir el régimen del motor, deben enviarse los mensajes CAN correctos según el protocolo J1939 a la unidad de mando para la interfaz eléctrica (BCI, interfaz de comunicación de carrocería).
El siguiente diagrama lógico permite utilizar mensajes CAN para controlar el régimen del motor desde fuera de la cabina. Cuando se activa el interruptor EXT y la toma de fuerza, se activará el régimen del motor 1.

Nota: La toma de fuerza EK que se muestra en este diagrama lógico solo es un ejemplo. Se pueden conectar todos los tipos de tomas de fuerza. El parámetro del régimen del motor 1 debe ajustarse en la herramienta de programación para carroceros (SDP3) de Scania, como se muestra en la siguiente ilustración.
| ||

Para poder recibir las señales fuera de la cabina, resulta adecuado enchufar un mazo de cables para las funciones de la carrocería al conector C494. El mazo de cables se distribuye a los 3 conectores DIN, C486, C487 y C488.
Encontrará más información en los siguientes documentos:
Descripción
Con esta función, el régimen del motor se puede aumentar hasta un valor predeterminado con diferentes condiciones, por ejemplo, con una toma de fuerza activada, como se muestra en el siguiente ejemplo.
Aplicaciones de ejemplo:
- Preparación del motor para el basculamiento de la plataforma.
- Preparación del motor para la elevación de la grúa.
Adecuado para aplicaciones como:
- Camiones volquete
- Camiones grúa
Función
Para poder recibir las señales fuera de la cabina, resulta adecuado enchufar un mazo de cables para las funciones de la carrocería al conector C494. El mazo de cables se distribuye a los 3 conectores DIN, C486, C487 y C488.
El siguiente diagrama lógico permite aumentar el régimen del motor hasta un valor predeterminado. Cuando se conecta la toma de fuerza EG, se activará el régimen del motor 1.

Nota: La toma de fuerza EG que se muestra en este diagrama lógico solo es un ejemplo. Se pueden conectar todos los tipos de tomas de fuerza.
El parámetro del régimen del motor 1 debe ajustarse en la herramienta de programación para carroceros (SDP3) de Scania, como se muestra en la siguiente ilustración.
- Tipo de control: valor fijo.
- Otros valores de configuración dependen de las necesidades de la carrocería.

Descripción
Esta función se puede utilizar para mostrar mensajes de la carrocería en el cuadro de instrumentos.
Adecuada para todo tipo de aplicaciones.
Función
Se activará la pantalla de información del conductor en el cuadro de instrumentos si se activa una señal baja o alta1 mediante la clavija 1 (opcional) en el conector entre mazos de cables C259.

Para poder recibir las señales fuera de la cabina, resulta adecuado enchufar un mazo de cables para las funciones de la carrocería al conector C494. El mazo de cables se distribuye a los 3 conectores DIN, C486, C487 y C488.
Encontrará más información en los siguientes documentos:
1. Debe estar predeterminado en BICT
Descripción
Esta función evita que el conductor conduzca con una quinta rueda desbloqueada.
Si el bloqueo se abre durante la conducción, el conductor recibirá una indicación de advertencia y la velocidad del vehículo se reducirá a 10 km/h (6 mph).
Adecuado para aplicaciones como:
- Vehículos con quinta rueda ajustable
- Tractoras
Función
- Cuando se activan el interruptor de la quinta rueda y el freno de mano, el operario [&] abrirá el bloqueo de la quinta rueda si la velocidad del vehículo es inferior a 1 km/h (0,6 mph).
- Cuando se activa esta función, se puede soltar el freno de mano y conducir el vehículo para ajustar la posición de la quinta rueda.
- Al conducir con el interruptor de la quinta rueda activado, la función cerrará el bloqueo de la quinta rueda si la velocidad del vehículo es superior a 5 km/h (3,1 mph).
- Si no se desactiva el interruptor de la quinta rueda durante la conducción, la velocidad no excederá los 10 km/h (6 mph).
- Si algún sensor detecta que la quinta rueda está en movimiento, el conductor recibirá una indicación de advertencia en el cuadro de instrumentos.
- Si ambos sensores detectan que la quinta rueda está en posición abierta, el conductor recibirá una indicación de advertencia en el cuadro de instrumentos y la velocidad del vehículo se reducirá a 10 km/h (6 mph).

Nota:
La dependencia del freno de estacionamiento asegura que el vehículo esté parado al activar la función.
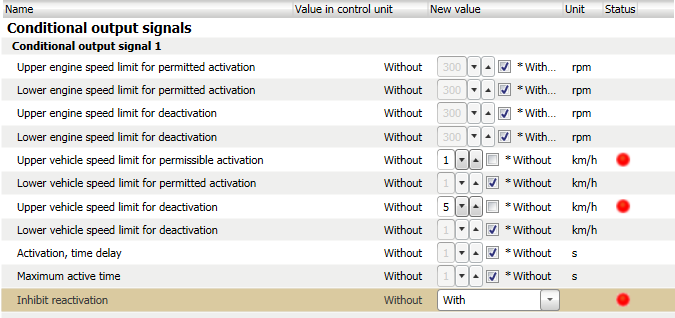
Los valores de velocidad para el control condicional se deben ajustar en la herramienta de programación para carroceros (SDP3) de Scania, tal como se muestra en la siguiente ilustración.
Señales de salida condicionales 1:
- Límite superior de velocidad del vehículo para activación permitida.
Valor establecido en: 1 km/h
- Límite superior de velocidad del vehículo para la desactivación.
Valor establecido en: 5 km/h
- Inhibición de reactivación
Valor establecido en: con
Encontrará más información en los siguientes documentos:
Descripción
Esta función permite ver en el cuadro de instrumentos si el acoplamiento del remolque está abierto o cerrado. El indicador puede apagarse mediante un interruptor de confirmación accionado por muelle.
Si el acoplamiento del remolque está abierto, se encenderá inmediatamente el indicador de dispositivo de tracción abierto.
Adecuado para vehículos con acoplamiento del remolque controlado a distancia para un remolque, o adaptador de remolque, acoplado con semirremolque.
Función
Esta función permite ver en el cuadro de instrumentos si el acoplamiento del remolque está abierto o cerrado. El indicador puede apagarse mediante un interruptor de confirmación accionado por muelle.
Si el acoplamiento del remolque está abierto, se encenderá inmediatamente el indicador de dispositivo de tracción abierto.
Adecuado para vehículos con acoplamiento del remolque controlado a distancia para un remolque, o adaptador de remolque, acoplado con semirremolque.

Haga clic en la imagen para ampliarla
Encontrará más información en los siguientes documentos:
